
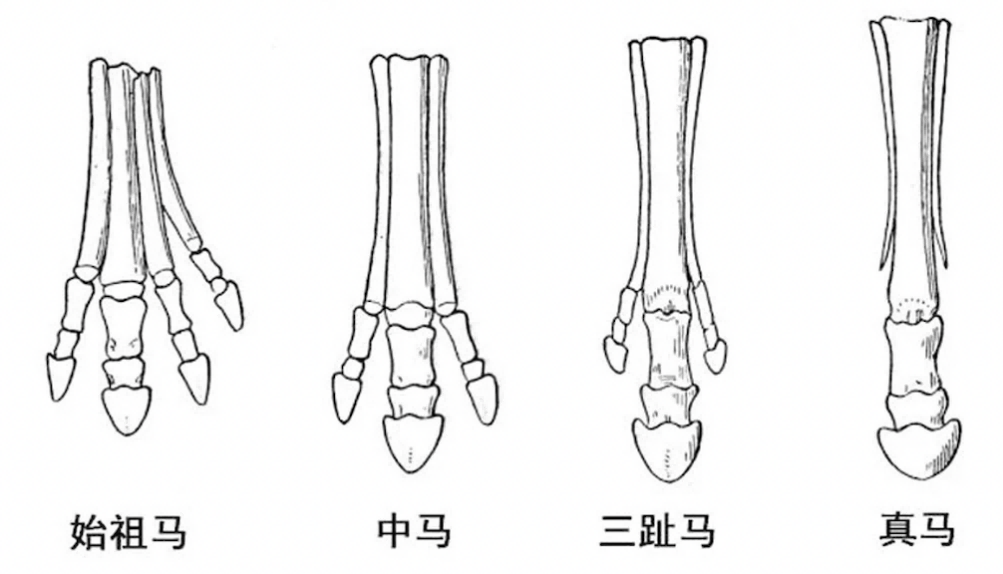
马是奇蹄目动物,只有一根单趾——马蹄。但是几千万年前,马的祖先——始祖马可是有四根脚趾的。在演化过程中,为了获得更高的奔跑效率,这四根脚趾外侧的三根逐渐退化消失,仅保留了中间的那根脚趾(第三趾)。
芭蕾舞演员踮起脚尖起舞,而马基本上相当于“踮起中趾奔跑”。这根被视为“进化奇迹”的单趾里,隐藏着大自然精妙绝伦的“手艺活”,让马的智慧以仿生的方式延续下来。
图源:embryology.med.unsw.edu.au
01.马蹄为什么被称为“进化奇迹”?
生物领域记录到的自主产生的最快冲击震动,是螳螂虾的棒状物冲击力,其速度达到23米/秒。疾驰的马蹄撞击地面的速度可以达到8米/秒以上。
在这种速度下,奔跑中马蹄的冲击力瞬间可达46~64N/kg。这相当于一个20公斤重的实心物体,从膝盖高度掉落砸中你的脚趾。换成人的话,脚早就废了,但马很少骨折,为什么?
要解开这个答案,我们首先需要了解马蹄的结构,甚至需要从看不见的微观尺度去逐一“解剖”。
1.1 马蹄结构
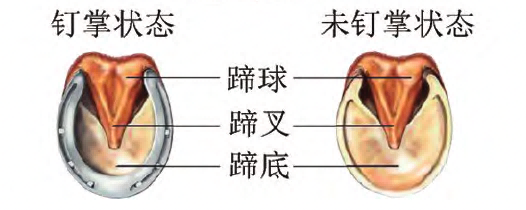
蹄壁:位于最外层的硬邦邦的部位,主要由角蛋白构成,这里就像我们的指甲,负责扛住主要压力,所以常常需要在这个部位装上“马蹄铁”。
蹄叉:位于中间那层软软的、有弹性的部位,像一个倒置的三角形,有助于抓握、牵引和将血液泵回腿部。
蹄底:位于最里层的一个凹陷结构,比蹄壁要柔软些,通常不直接承受重量。
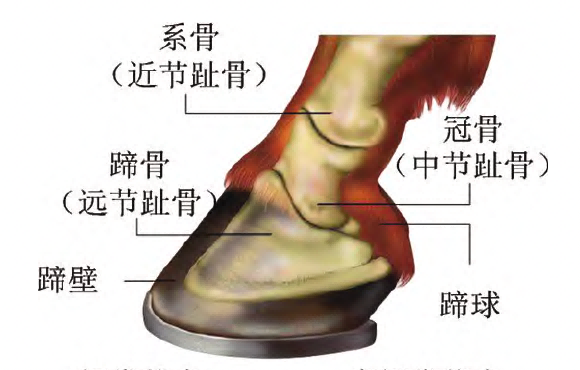
冠骨:位于脚趾后面,周围有软组织提供缓冲。
蹄球:位于蹄叉的上方,由脂肪和纤维构成,每走一步都会压缩和膨胀,以吸收冲击和保护内部组织。
图源:参考文献2
图源:参考文献2
1.2 蹄壁结构
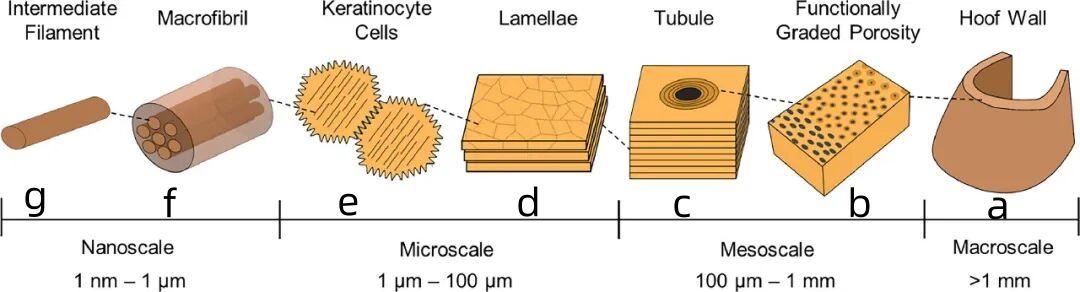
马蹄壁相当于马的“趾甲”,具有支撑作用,但在显微镜下却是一种复杂的层级结构。
图源:参考文献3
a:蹄壁
b:管状结构:直径约40-100微米。呈现梯度变化,越靠近蹄壁内侧,刚性逐渐降低
c:髓腔:空心,位于管子中心,周围环绕着硬质管壁
d:螺旋状层片:构成管壁
e:薄片状细胞:构成层片
f:角蛋白中间丝:填充在薄片状细胞内部,呈晶体状排列
g:单个角蛋白中间丝
马蹄具备的这种从纳米到宏观尺度的复杂层级结构,能够将多个尺度上的抗冲击策略整合起来,在此基础上形成单元协作,增强整体结构的力学性能,吸收冲击、耗散能量并限制损伤,相当于给马安装了一套“减震系统”。
02.“减震系统”如何发挥作用?
想象一下,一匹马在奔跑中马蹄落地的瞬间,巨大的能量不会直接冲击震荡,而是被马蹄的“减震”系统在多个尺度上协同化解。
2.1 马蹄壁:分散与耗能
当马蹄的外部冲击力较低时,冲击能量率先在蹄壁中被分散与耗散。
蹄壁内部呈规律状排列的管状结构,像一堵结实的“路障墙”,受到冲击会形成细小的裂纹,而在“路障墙”的阻拦下这些裂纹会发生偏转,从而将这股冲击力分散。
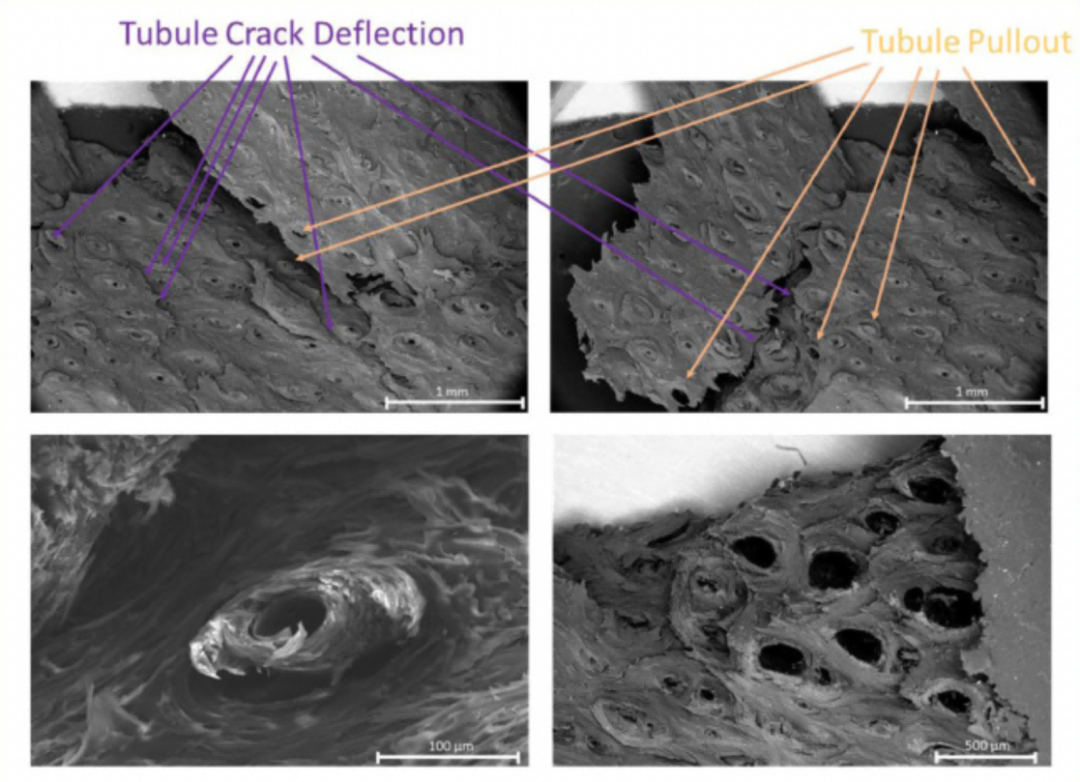
SEM(扫描电镜)中观察到的裂纹偏转
图源:参考文献3
不仅如此,这些“管子”从硬到软的排列特性,造成了材料界面的不稳定性,可以防止“管子”在某一点突然断裂。
而“管子”的空心髓腔,则会通过自身的弹性变形,进一步吸收和耗散能量。螺旋状层片彼此之间会产生微小的滑移和错动,以此来消耗掉部分冲击能量。这就像书本摞在一起会发生层间错位,以此来分散压力。
除此之外,构成蹄壁的角蛋白,就像一块含水的海绵——靠水分和层层纤维,把一瞬间的撞击悄悄"吸"走。这种特性在材料科学上称为黏弹性:它不像弹簧那样把能量原封不动弹回去,而是在分子和细胞两个层面上,把冲击能量缓慢转化为热量散掉。
至此,蹄壁通过以上这些机制,已经足以承担大部分的耗能任务。不过,当受到的冲击力较强时,马蹄的其他组织也会加入协同作战。
2.2 其他组织:缓冲吸能
蹄叉倒三角形的柔软结构能够变形,吸收冲击能量。同时,蹄叉增加了与地面的接触面积,提供了额外的抓地力和稳定性。
蹄球则像海绵一样把冲击能量“吃”进去,又迅速回弹重复,既吸收了能量,还能像泵一样挤压血管,促进局部血液循环,一举两得。
最深处的蹄底与冠骨周围软组织则承担起保护骨骼关节的最终角色。它们就像给骨头穿上一层减震凝胶,确保传递到骨骼关节的力始终在安全范围内,从而避免骨折。
总之,马蹄的整个抗冲击过程,是一个从纳米到宏观尺度的精妙的协同系统。它遵循“多尺度协同耗能”的策略,将致命的瞬间冲击转化为多层材料的弹性形变、黏弹性耗能和裂纹偏转,从而将力量逐步耗散。这不仅是生物演化的奇迹,也为人类设计抗冲击材料提供了顶级灵感。
03. 马蹄的智慧,能用在哪里?
仿生学发展经历了一段“进化之路”——从早期的“照猫画虎”,升级为今天的“学猫捉鼠”。早期的仿生,以构型仿生为主,即依赖于对生物形态的模仿。现如今,科学家们转向从生物功能本源出发,通过深度解析生物系统的作用机制和原理, 直接提取功能性设计准则。

明式家具的马蹄腿造型
图源:上海博物馆
早期的马蹄仿生更多停留在‘形似’,而现代仿生学则更进一步,追求‘神似’——即对生物力学原理的深度复刻。现在,马蹄的智慧正以不同的方式,在各个领域“落地开花”。
3.1 新型材料制备
出于不同的现实需求,科学家们选取了不同的仿生切入点。其中最直接的一个问题是:如何将马蹄结构完美复刻,开发出一种新型材料?
科学家们仿照马蹄蹄壁的层级结构,开发出了一种新型仿生蜂窝结构材料。这种材料在受到剧烈冲击时,管状结构会发生预设的形变和相互摩擦,吸收掉绝大部分能量。
与传统的蜂窝结构相比,马蹄形蜂窝结构的抗压强度提高了43.8%。它比传统的铝蜂窝材料更轻、更抗压,未来可用于航天器着陆支架或高性能赛车保险杠。
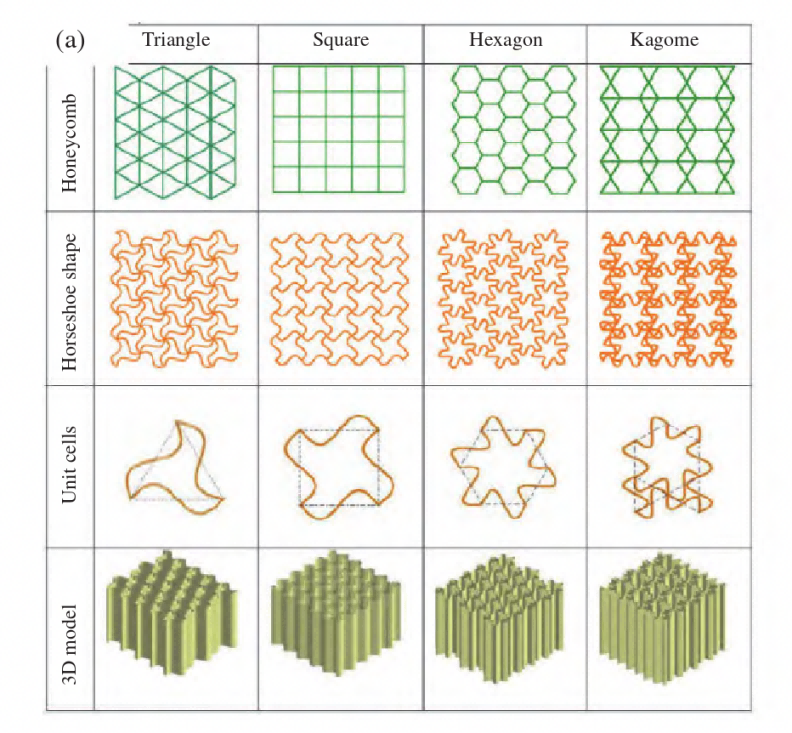
仿生蜂窝结构材料
图源:参考文献4
此外,马蹄也启发了传感器领域的一项突破。气凝胶不仅是传感器的封装材料,也是传感器的核心敏感层。但传统柔性传感器往往面临“高灵敏度则量程窄,宽量程则灵敏度低”的权衡问题。
东华大学通过研究模仿马蹄的刚度梯度特性,成功制备出一种聚酰亚胺纳米纤维/碳纳米管双梯度气凝胶——顶部大孔区极易变形,负责捕捉微小压力,提供高灵敏度;底部小孔区刚性较强,负责承载大压力,提供宽量程。这种设计实现了从柔性到刚性的动态转变,巧妙解决了灵敏度和量程之间的固有矛盾。
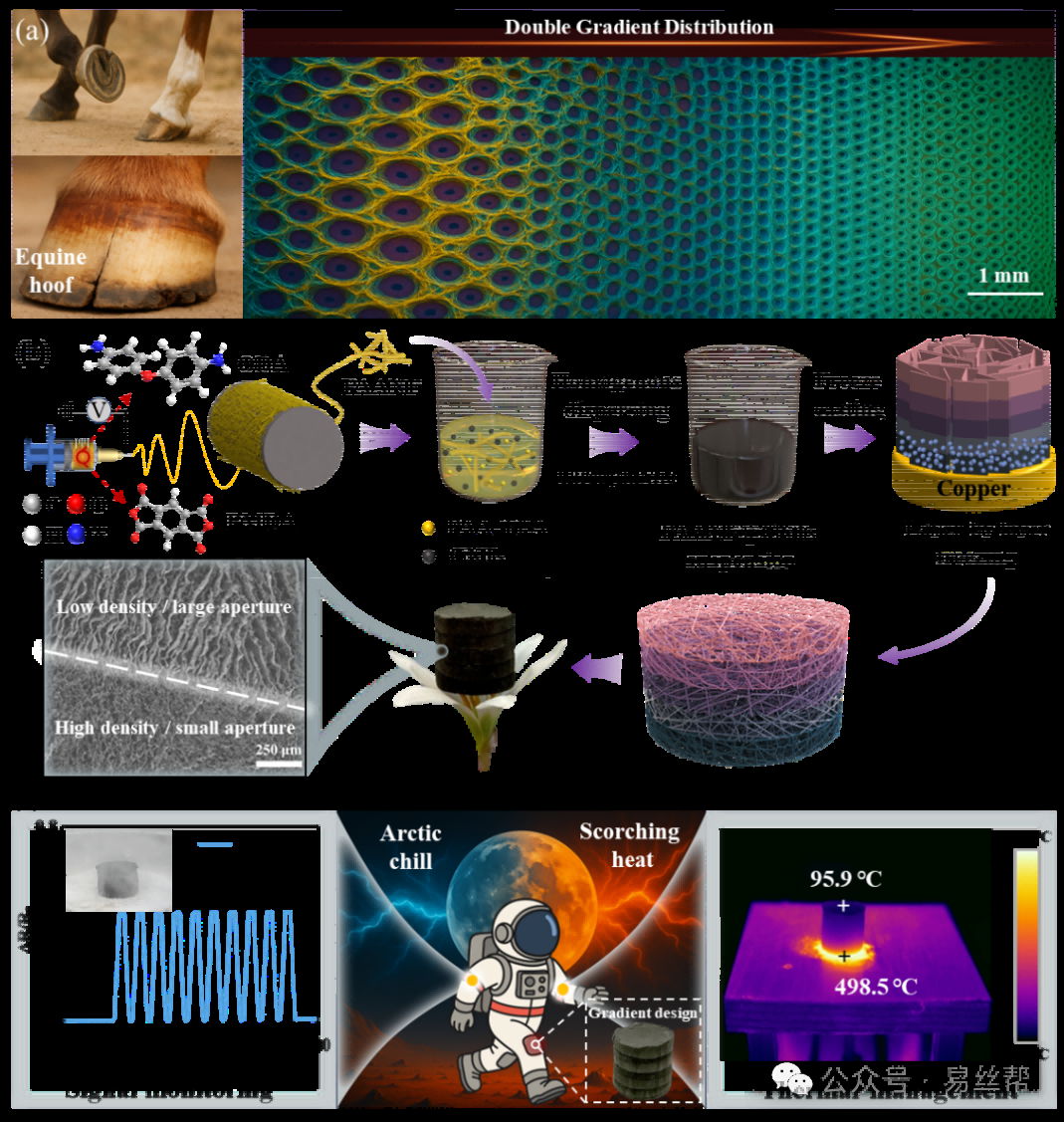
双梯度纳米纤维气凝胶的仿生设计与应用
图源:参考文献5
(a) 马蹄及其梯度结构
(b) PINF@CNTs双梯度气凝胶制备流程图
(c) 气凝胶在航天服中用于极端环境下健康监测与隔热的应用示意图
除了直接制备新材料,科学家们还尝试应用增材制造技术(3D打印),把马蹄的“层级结构”打印出来。3D打印与仿生结构设计的结合,近年来也越来越受到关注。
来自澳大利亚国立大学、美国加州大学圣地亚哥分校的科学家们,仿照马蹄壁结构,用增材制造技术(3D打印)开发出了两种不同的复合结构,优化了马蹄壁仿生材料的设计,能够有效增强能量吸收和裂纹控制,显著提升了材料的抗拉伸性能。
3.2 机器人设计
马蹄仿生技术还为足式机器人提供了一个“智能减震器”的解决方案,帮助它们在复杂多变的环境中实现更高效、更稳定、更节能的运动,让机器人的“奔跑”更接近自然界的灵动与力量。
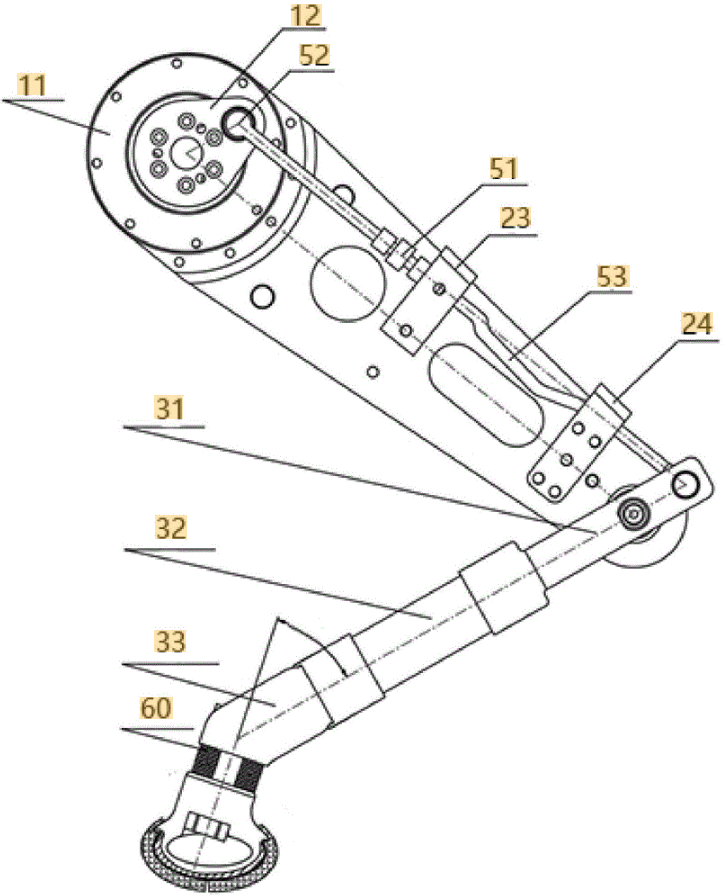
山东理工大学的研究团队设计了一种马蹄型仿生足,它采用金属蹄靴提供骨骼般的支撑,并集成橡胶蹄球来模拟生物的吸能缓冲机制。
实验证明,这种仿生足能显著降低机器人在硬质路面行走时的触地冲击力,同时利用马蹄特有的几何构型,有效增加了在沙地等松软介质上的抓地力和防陷能力。
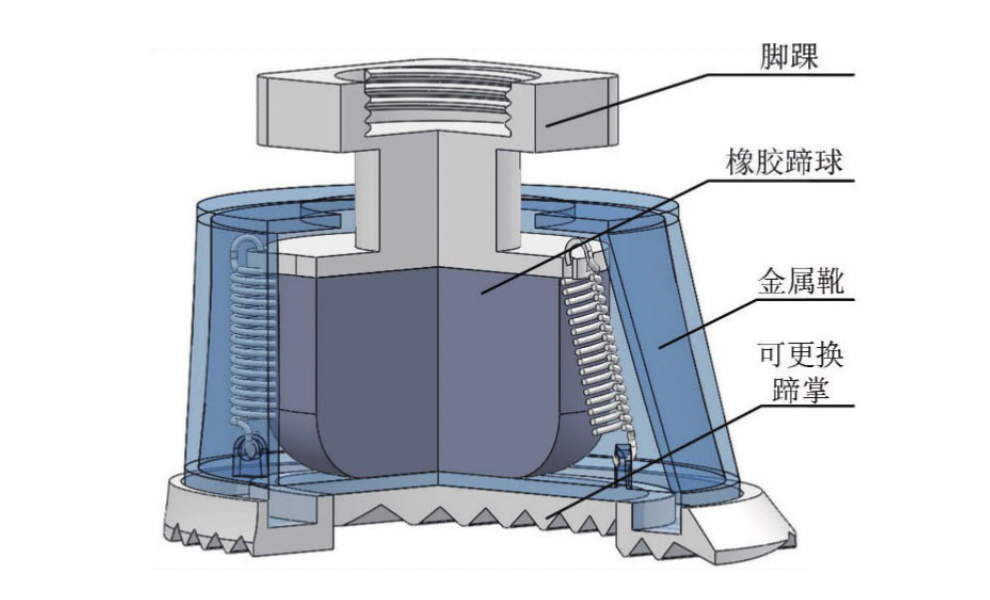
山东理工大学设计的马蹄型仿生足
图源:参考文献2
厦门大学团队发明了一种能够在复杂路线上稳定行走的马蹄形足端感知机器人,其中足端部分就是从马蹄的形态与弹性缓冲机制中提取仿生灵感。
其足端设计包括足体和弹性结构部分,足体的底部轮廓设计成近似椭圆状的仿马蹄形结构,并用弹性结构包覆住足体的底部,形成了“刚性负载+弹性外层”的复合结构,是一种从马蹄形态到功能的仿生设计。
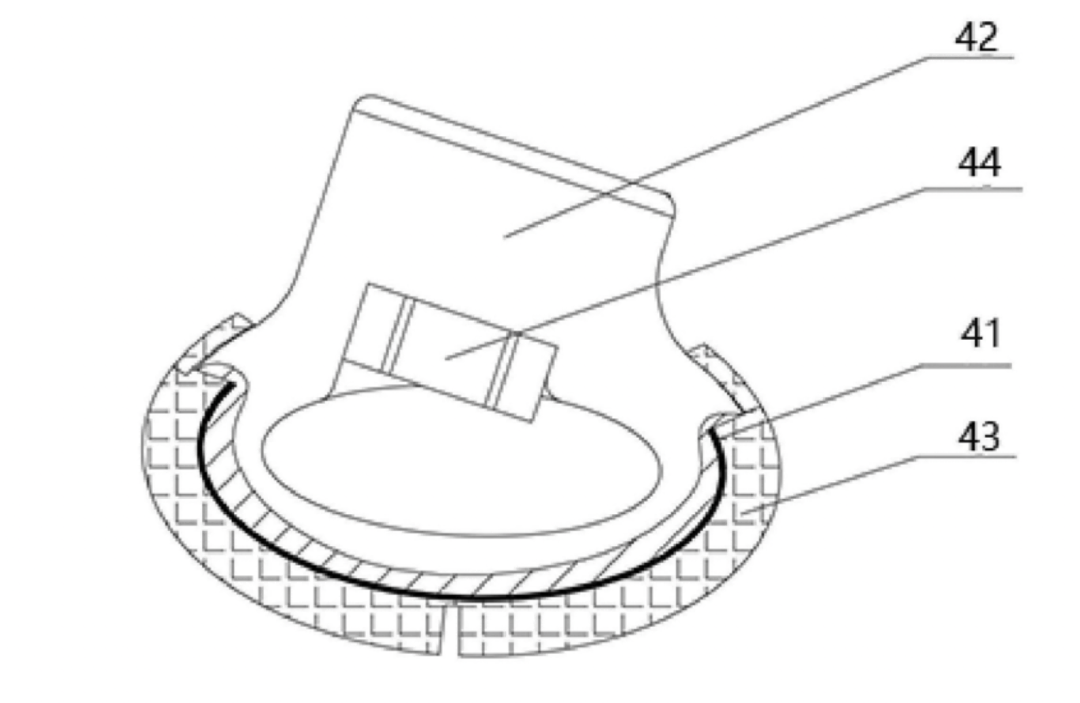
图源:参考文献8
这些研究的突破,使得马蹄的仿生应用也正在向防护装备、航空航天防撞结构等领域不断延伸……
04.马的第二次奔跑
马用5600万年演化的“方案”,正成为现代工程的“顶级题库”。除了马蹄之外,马身上能够“抄作业”的地方还有很多。
马的接近360度全景视觉启发了车载环视系统;其呼吸与奔跑的节奏耦合,展示了能量利用的极致经济性;而马腿的骨骼肌腱布局,更成为波士顿动力等顶尖机器人设计的力学教科书。
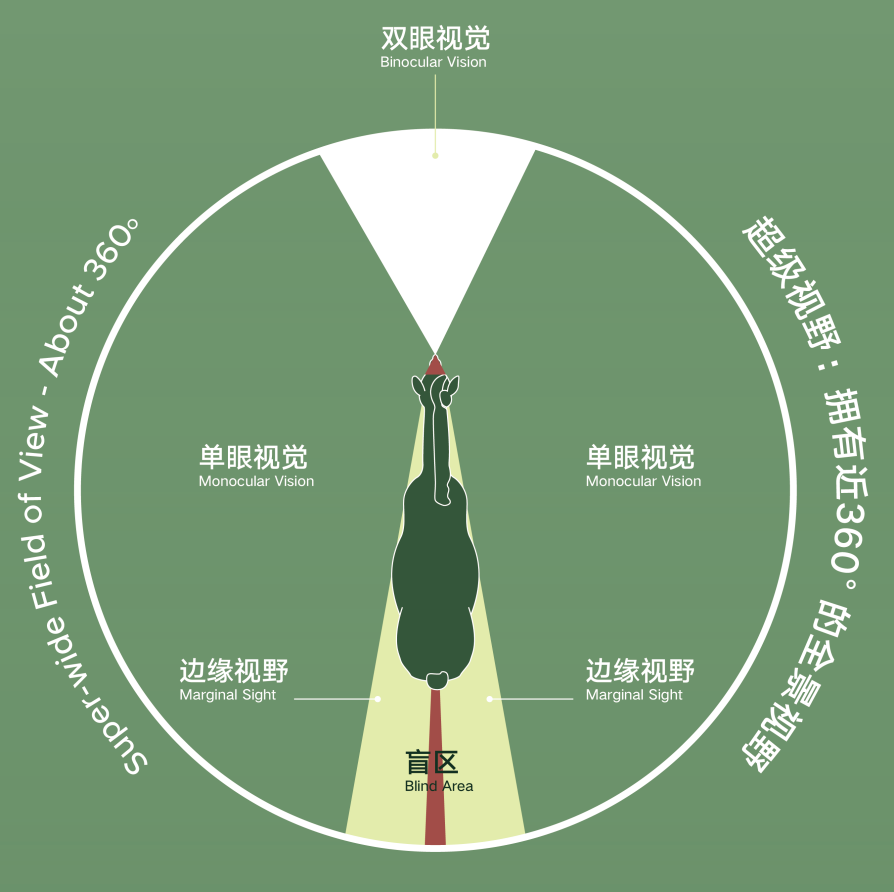
马的视野只有几乎4度的盲区
图源:上海科技馆
这些技术听起来挺杂,但背后有共同点。当我们将目光从单一的“马蹄支撑”拓展到马的视觉、呼吸、运动控制等多重系统时,会发现真正值得学习的不是某个孤立的结构,而是生物体如何用最经济的材料、最简洁的机制,实现多目标协调优化——这就是仿生学从“模仿形态”走向“理解原理”的关键转变。
马的第一次奔跑,用四蹄征服了草原;第二次奔跑,用智慧启示着未来,引领人类向更遥远的边界进发。
版权归原作者所有,如有侵权,请联系我们